Processing Divided Roads
Divided roads are roads that consist of a physical barrier (median) with one-way travel lanes on both sides. They are also represented as two one-way roads (way objects) in OpenStreetMap, which causes problems when identifying intersections. The divided_process function in tpov_match.py, along with the process_divided list of parameters, control whether to include or exclude certain roads from being included in intersection identification.
Example of a Divided Road Intersection
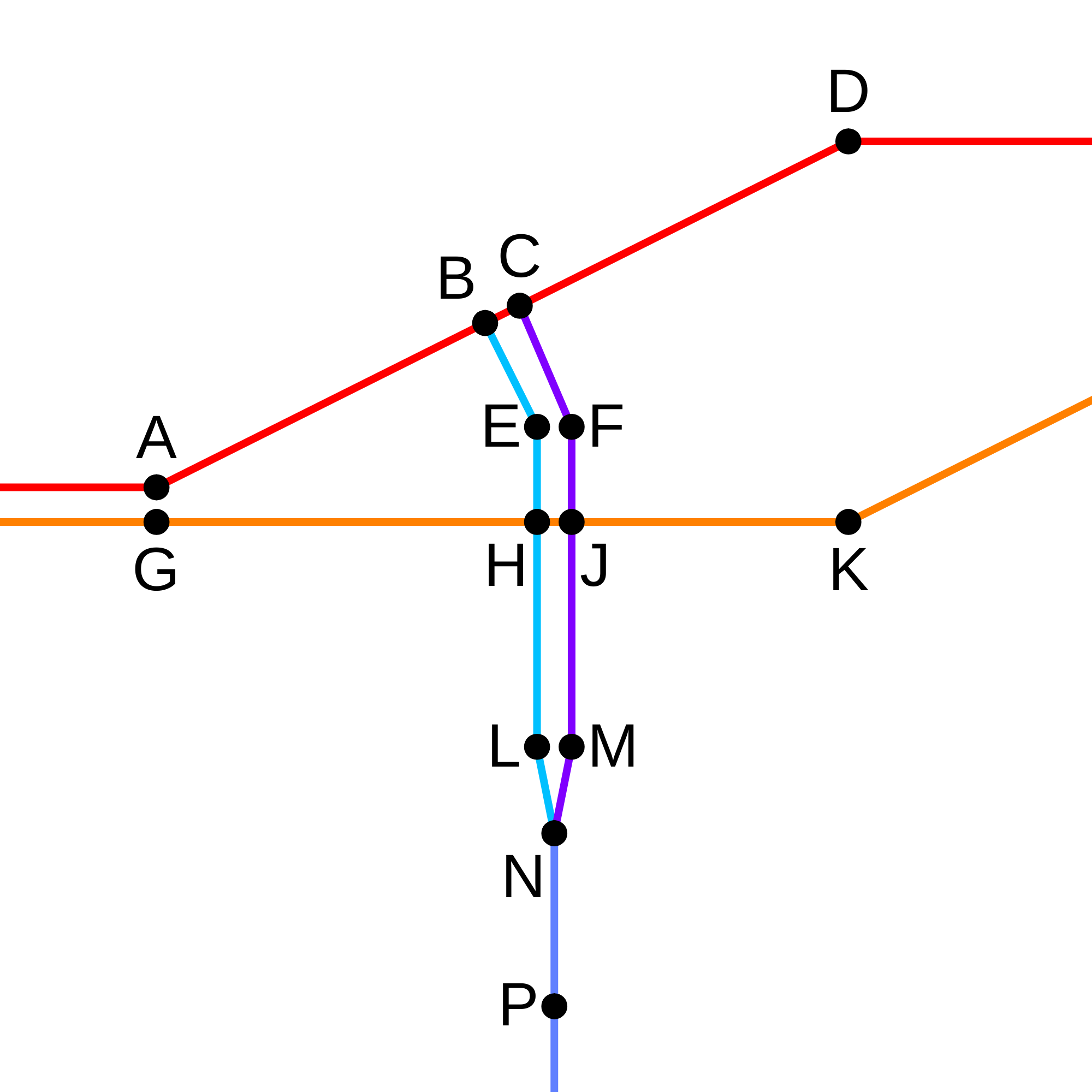
The diagram below shows an example of a two-way road that separates into a divided road, which then intersects with another divided road at an angled T-junction. Travel directions are as follows (This diagram assumes right-hand traffic):
Road 1 (East-West):
G -> H -> J -> K (Orange)
D -> C -> B -> A (Red)
Road 2 (North-South):
P -> N -> M -> J -> F -> C (Blue -> Purple)
B -> E -> H -> L -> N -> P (Cyan -> Blue)
All further documentation will refer to the diagram below.
 Example of a divided road intersection
Example of a divided road intersection
process_divided Parameters
process_divided parameters are shared across all cases of divided road processing.
angle- The maximum angle difference of the two sides of the divided road (e.g.GHtoBA). If the angle difference is greater than this value, they will be treated as separate roads.length- The maximum distance between the two sides of the divided road (e.g.BEHorJFC). If the distance is greater than this value, they will be treated as separate roads.same_name- IfTrue, the two sides of the divided road must have the same name to be considered the same road.apply_filter- IfTrue, theexit_filterfunction (docs) will be applied to divided road processing. For example, this could mean that a four-way intersection with one side being a service road is treated as a T-junction.enabled_cases- A list of which cases (see below) are enabled. There are currently 4 cases.
Case 1: Ignore short spur which leads to the opposite side of the divided road
Travel path: G -> H -> J -> K
Sensical intersection representation:
Current |
Left |
Forward |
Right |
Direction |
|---|---|---|---|---|
H |
J |
L |
Forward |
Purely logical representation:
Current |
Left |
Forward |
Right |
Direction |
|---|---|---|---|---|
H |
J |
L |
Forward |
|
J |
F |
K |
Forward |
Case 1 ignores the spur JFC as it just leads to the opposite side of the divided road.
Parameters:
angle:HJtoCBlength:JFC
Case 2: Ignore exit to the opposite side of the divided road at a turn
Travel path: D -> C -> B -> E -> H -> L
Sensical intersection representation:
Current |
Left |
Forward |
Right |
Direction |
|---|---|---|---|---|
B |
E |
A |
Left |
Purely logical representation:
Current |
Left |
Forward |
Right |
Direction |
|---|---|---|---|---|
B |
E |
A |
Left |
|
H |
J |
L |
Forward |
Case 2 ignores the opposite side of the divided road (HJ).
Parameters:
angle:CBtoHJlength:BEH
Case 3: Add exit for a far turn (left in right-hand traffic) onto a divided road at a T-junction
Travel path: M -> J -> F -> C -> B -> A
Sensical intersection representation:
Current |
Left |
Forward |
Right |
Direction |
|---|---|---|---|---|
F |
J |
K |
Forward |
|
C |
B |
Left |
Purely logical representation:
Current |
Left |
Forward |
Right |
Direction |
|---|---|---|---|---|
F |
J |
K |
Forward |
Case 3 adds a row to show that a left turn was made, even though there is no intersection at C due to only one possible direction.
Parameters:
Angles (Both have to be satisfied):
prev_angle:MJtoJFangle:JKtoCB
length:JFC
Case 4: Ignore “intersection” when a divided road merges back into a two-way road
Travel path: H -> L -> N -> P
Sensical intersection representation:
Current |
Left |
Forward |
Right |
Direction |
|---|---|---|---|---|
Purely logical representation:
Current |
Left |
Forward |
Right |
Direction |
|---|---|---|---|---|
N |
M |
P |
Forward |
Case 4 ignores segment NM as it is a U-turn back to the same road.
Parameters:
angle:HLtoMJ(Not currently used)Lengths (Both have to be satisfied):
dist:LMdist2:HJ